In the future we know autonomous vehicles will be ubiquitous, we wanted to explore if autonomous vehicles can be used as control centers in a mixed traffic with both human driven and autonomous vehicles. I know humans arent the best of drivers but AVs? We developed a method to stabilise traffic flow no matter what perturbations are caused by humans :)
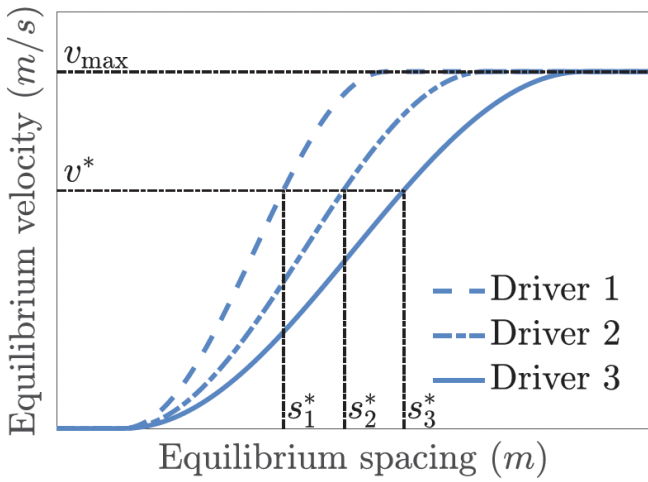
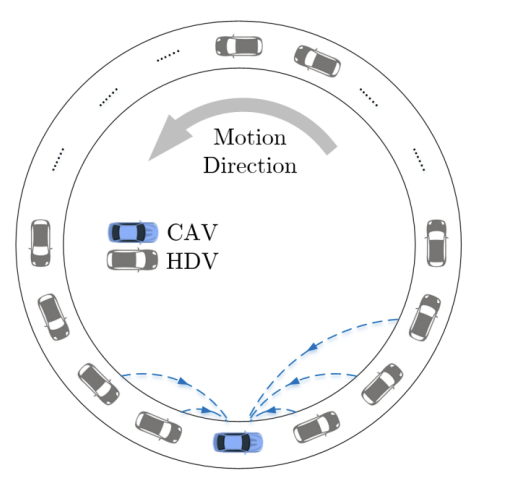
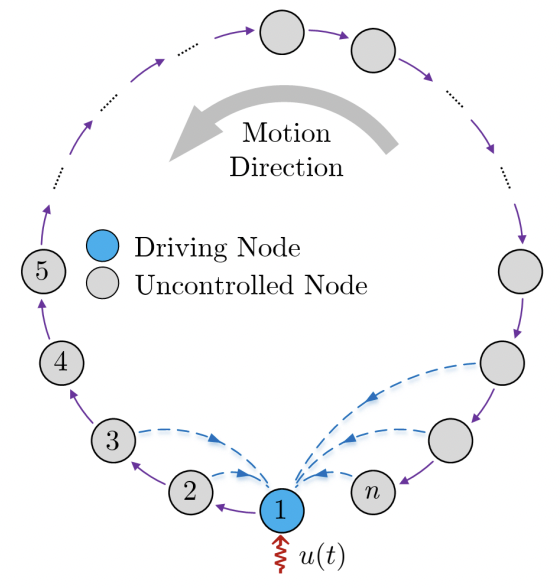
Benchmark is the ring road experiment which is considered the ideal scenario with single lane, no traffic lights, no stop signs. Kind of not a very ideal scenario but then you know things move from ideal to practical. We use infinite loop as an optimum vehicle model (OVM). The autnomous vehicle controls for equilibrium vehicle and spacing between different human vehicles
The emergence of connected and autonomous vehicles (CAVs) has provided new opportunities for smoothing traffic flow
The model works as a funciton of spacing between position between vehicles, rate of change between spacing and velocity of the autonomou svehicle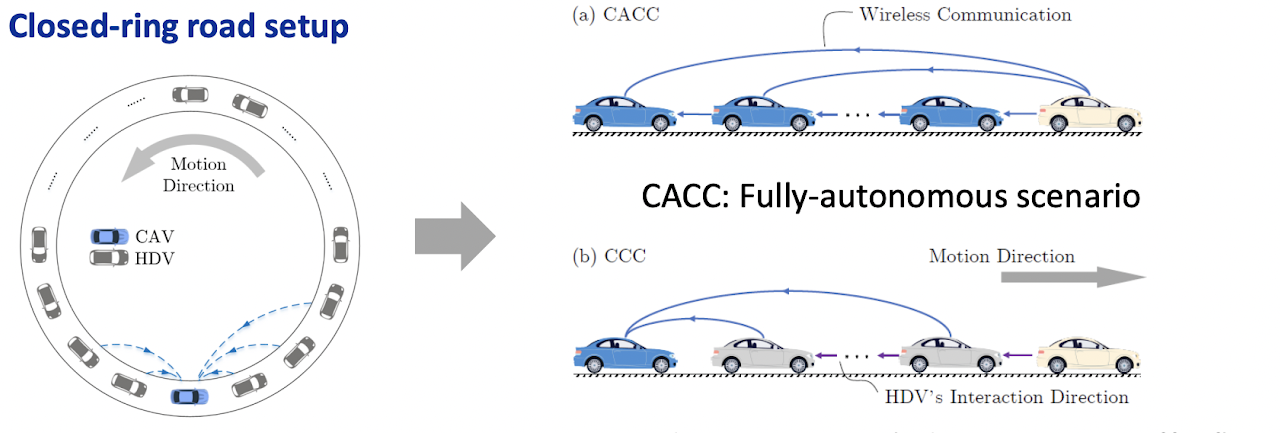

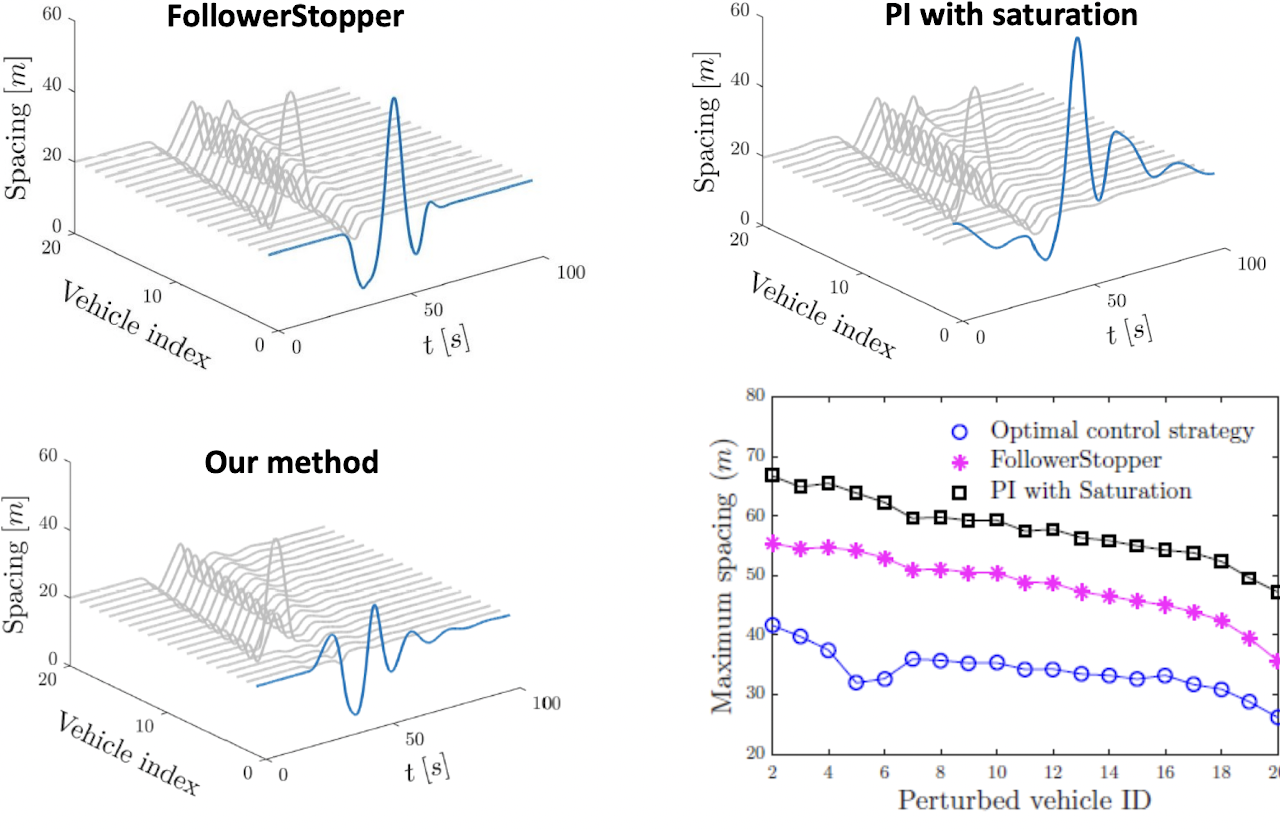
Our strategy allows the CAVs to eliminate velocity overshoot, improve fuel economy, and constrain the spacing among the safe range contributing to smoother traffic flow with safety guarantees. This allows for AVs to act as traffic cops controlling speed.
Traffic simulations have shown the significant improvement of our strategy in traffic efficiency and fuel economy, with safety guarantee. Some interesting future directions include incorporating delayed trajectory data caused from communication delay, exploring the scalability of DeeP-LCC for large-scale mixed traffic, and addressing the problem of time-varying equilibrium traffic states.
A good future application is what if I use sparse matrices to control swarm drones with a control node used by one execultive and the rest adjusting themselves with the Function of spacings in 3 dimension.